|
|||||||||
 |
 |
 |
 |
 |
 |
 |
|||
-------------------------------------------- -------------------------------------------- --------------------------------------------
|
|
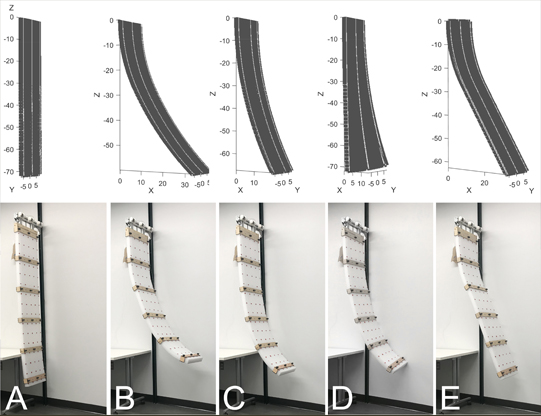
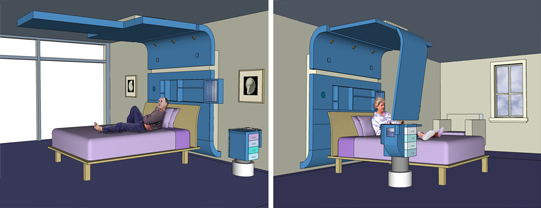
Robot Surfaces Introducing a humanoid or industrial robot into living and working spaces is intrusive and disruptive. On the other hand, an “architectural” robot embedded in the physical envelope of the room can virtually disappear. Humanoid, pet-like, and industrial robots never go away but stand awkwardly like sentries “on a rest break” until commanded by their masters to guard and otherwise control the space. We envision this architectural robot—a robot surface—as capable of performing some of the manipulation tasks we might expect from a humanoid or industrial robot (e.g. grasping, reaching, supporting, pointing, twisting, carrying, pushing, lifting). Additionally, and unlike humanoid, pet-like, and industrial robots, the robot surface has the added benefit of reconfiguring the spatial envelope of the room to shape, essentially, different "rooms" matched to the unfolding of activity. Indeed, there is a deep literature on the impacts of the spatial environment on work performance and on quality of life which can help inform the configurations such a robotic room might assume to support human activity. But while traditionally, a room is a passive frame to our lives, we envision a robot surface as an active agent. This “space agent” has neither the behavior of a living referent (as does a humanoid or pet-like robot), nor does it appear to be an industrial machine; rather, this space agent has its own life, its own behavior, resonant perhaps with what we know of living things and machines. Inevitably, as robots become an increasingly familiar presence in our living spaces, we will be less dependent on them looking and behaving like familiar living things or like machines; the artificial life of space agents will be intelligible to us as we come to live together. In more practical terms, the Architectural Robotics Lab has been developing fundamental research in morphing 2D robot surfaces for actively shaping and dividing physical spaces, as reported at IEEE IROS, ICRA, and CASE as well as ACM TEI. The approach is foundational for robotics in offering completely new functionality, achieved via innovative physical realizations of robot surfaces. We are currently focusing our efforts on interlaced (i.e. woven and knitted) actuators, both pneumatic (McKibben) and tendon. We aim to demonstrate the utility of these novel robot surfaces at two scales (space-making robot surfaces, actively shaping the in-building physical environment, and wearable surfaces, providing reconfigurable, on-body environments) for two use cases of urgent social need (micro-homes and offices, and open-plan spaces).
publications: Sirohi, R, Wang, Y., Hollenberg, S., Godage, I. S., Walker, I. D., and Green, K. E. 2019. Design and Characterization of a Novel, Continuum-Robot Surface for the Human Environment. In Proceedings of the 15th Conference on Automation Science and Engineering (IEEE CASE 2019), August 22-26, Vancouver, BC, pp. 1169 – 1174. [video] Wang, Y., Frazelle, C., Sirohi, C., Li, L., Walker, I. D., and Green, K. E. 2019. Design and Characterization of a Novel Robotic Surface for Application to Compressed Physical Environments. In Proceedings of the 2019 International Conference on Robotics and Automation ICRA 2019), May 20-24, Montreal, Canada, pp. 102-108. DOI: 10.1109/ICRA.2019.8794043 Wang, Y. and Green, K. E. 2019. A Pattern-Based, Design Framework for Designing “Collaborative Environments” In Proceedings of TEI 2019, the Thirteenth International Conference on Tangible, Embedded, and Embodied Interactions (TEI 2019). ACM, New York, NY, USA, 595-604. DOI: https://doi.org/10.1145/3294109.3295652
|
|
||||||
 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|


 Robot Surfaces as envisioned in open-plan restaurants and cafes.
Robot Surfaces as envisioned in open-plan restaurants and cafes.