|
|||||||||
 |
 |
 |
 |
 |
 |
 |
|||
-------------------------------------------- Sharmayne Lim P I s : -------------------------------------------- Nithesh Kumar Xingda Chen Joanna Tan Serena Guo John Momeni Katelynn Thorne Jenny Yu Huong Pham Huong Pham --------------------------------------------
|
|
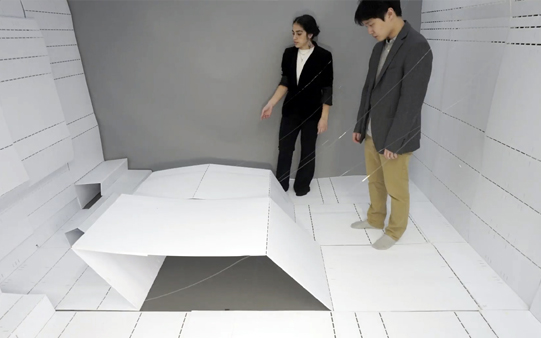
Robot-Rooms / Robot Surfaces This project’s goal is to explore how robotic systems could become deeply integrated into people’s living and working spaces via “robot-rooms.” People are increasingly using technologies such as voice assistants and intelligent thermostats to customize and interact with spaces; the project team’s vision is to use robotic surface technologies they have developed to allow the room itself to change configuration and physically interact with occupants. This scenario may have benefits in a number of contexts: houses that adapt to facilitate family and individual interaction; workspaces that automatically adjust to an individual’s abilities and tasks to make work more comfortable and efficient; hotels and apartments that can adapt to many different visitors in a short time; museum exhibits that provide a wide variety of immersive experiences; and many others. We have focused our efforts on different actuators, both pneumatic (McKibben), tendon, and soft (slicone-base), also organizing them in the manner of textiles (i.e. woven and knitted). We aim to demonstrate the utility of these novel robot surfaces for two use cases of urgent social need (micro-homes and offices, and open-plan spaces).
N. Kumar, H. -M. Chao, B. D. Da Silva Tassari, E. Sabinson, I. D. Walker and K. E. Green. 2024. Design of Two Morphing Robot Surfaces and Results from a User Study On What People Want and Expect of Them, Towards a "Robot-Room", 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 2024, pp. 11239-11244, doi: 10.1109/ICRA57147.2024.10611246. > video Ge (Serena) Guo, Raquel Canete Yaque, Jenny Yu, Gilly Leshed, Ian D. Walker and Keith Evan Green. [in press]. When the Robot Surrounds Us: Co-Designing a New Human-Robot Interaction in a Full-Scale, “Robot-Room” Rapid Prototype. [in press] IEEE RO-MAN 2025. > video Sharmayne Lim, Nayeon Kwon, Eric Gendreau and Keith Evan Green. [in press]. Teaching Human-Robot Interaction: Using Speculation and Fiction to Make Spaces for Possible Robotic Futures. [in press] IEEE RO-MAN 2025.
Hsin-Ming Chao, Shivani Shrotri, Eleanor White, Bruno Tassari, Cheng Zhang and Keith Evan Green. [in press]. Light Everywhere: Three Studies Investigating a Wall-and-Ceiling Climbing Robot Shedding Light on the Flexible Home. [in press] IEEE RO-MAN 2025. > video Ian D. Walker, Nithesh Kumar, and Keith E. Green. 2024. Animated Surfaces for Novel Robot-Rooms (Poster), The 16th International Workshop on Human-Friendly Robotics (HFR 2023), Munich, Germany, September 2023. Sirohi, R, Wang, Y., Hollenberg, S., Godage, I. S., Walker, I. D., and Green, K. E. 2019. Design and Characterization of a Novel, Continuum-Robot Surface for the Human Environment. In Proceedings of the 15th Conference on Automation Science and Engineering (IEEE CASE 2019), August 22-26, Vancouver, BC, pp. 1169 – 1174. Wang, Y. and Green, K. E. 2023. How Do We Want to Interact with Robotic Environments? User Preferences for Embodied Interactions, from Pushbuttons to AI. Book Chapter. In P. Morel and H. Bier (ed.s) Disurptive Technologies: The Convergence of New Paradigms in Architecture. Springer Series in Adaptive Environments. New York: springer, Cham. pp. 25-44. https://doi.org/10.1007/978-3-031-14160-7 3. G. Tan, H. Hidalgo, H. -L. Kao, I. D. Walker and K. E. Green. 2022. A Continuum Robot Surface of Woven, McKibben Muscles Embedded in and Giving Shape to Rooms, 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 2022, pp. 11432-11437. https://doi.org/10.1109/ICRA46639.2022.9811987. Wang, Y., Das, K., and Green, K. E. [2021]. Are Robots Perceived as Good Decision-Makers? Investigation of Trust & Preference of Robot Referees. Journal of Behavioral Robotics, vol 12, pp. 287-296. DOI: https://doi.org/10.1515/pjbr-2021-0020. Green, K. E. 2022. Robots in the Room, Robots Are the Room: The Future of Robotics, Architectural Design, and Domestic Routine. Book Chapter. In The Routledge Companion to Ecological Design Thinking: Healthful Ecotopian Visions for Architecture and Urbanism. Routledge. Y. Wang and K. Evan Green. 2022. Designing Socially Interactive, Robotic Environments through Pattern Languages. 2022 18th International Conference on Intelligent Environments (IE), Biarritz, France, 2022, pp. 1-8, doi: 10.1109/IE54923.2022.9826761. Yixiao Wang and Keith Evan Green. 2021. Space Agency: A ‘Strong Concept’ for Designing Socially Interactive, Robotic Environments. In Social Robotics: 13th International Conference, ICSR 2021, Singapore, November 10–13, 2021, Proceedings. Springer-Verlag, Berlin, Heidelberg, 295–307. https://doi.org/10.1007/978-3-030-90525-5_25 Wang, Y., Frazelle, C., Sirohi, C., Li, L., Walker, I. D., and Green, K. E. 2019. Design and Characterization of a Novel Robotic Surface for Application to Compressed Physical Environments. In Proceedings of the 2019 International Conference on Robotics and Automation ICRA 2019), May 20-24, Montreal, Canada, pp. 102-108. DOI: 10.1109/ICRA.2019.8794043 Wang, Y. and Green, K. E. 2019. A Pattern-Based, Design Framework for Designing “Collaborative Environments” In Proceedings of TEI 2019, the Thirteenth International Conference on Tangible, Embedded, and Embodied Interactions (TEI 2019). ACM, New York, NY, USA, 595-604. DOI: https://doi.org/10.1145/3294109.3295652 g r a d u a t e s t u d e n t t h e s e s: Nithesh Kumar
Nithesh Kumar
Nithesh Kumar (2025). Advancing smart and adaptive living spaces through design and development of reconfigurable, multifunctional robot-rooms. [Doctoral dissertation, Clemson University]. Hsin-Ming Chao. (2025). Design and Evaluation of Light Everywhere: A Wall-and-Celing Climbing Robot Offering Lighting Flexibility for Domestic Activities. [Master’s dissertation, Cornell University]. John Momeni. (2025). 2-D Continuum Arm for Compliant Surface Manipulation. [M.Eng report, Cornell University].
|
|
||||||
 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|