--------------------------------------------
p r o j e c t l e a d :
Elena Sabinson
PhD student, DEA, Cornell
P I s :
Keith Evan Green l e a d P I
Design and Mech. E, Cornell
Kirstin Petersen
ECE, Cornell
Gary Evans
Environmental Psychology, Cornell
--------------------------------------------
s t u d e n t t e a m :
Jack Neiberg
BS, Design, Cornell
Isha Pradhan
MEng, MAE, Cornell
Alex Steelman
BS, Civil. E, Cornell
Aratrika Ghatak
BS, Mech. E, Cornell
Ian Lee
BS, InfoSci and Biology, Cornell
--------------------------------------------
|
 |

pheB
Plant-Human Embodied Biofeedback
A Soft Robotic Surface for Emotion Regulation in Confined Physical Space
v i d e o s :
early overview [video]
RO-MAN 2021 breathing study [video]
IROS 2021 ocean wave simulation [video]
HRI 2024 big-N breathing study [video]

Our final bio-cyber-physical prototype.
o v e r v i e w :
There is an urgent need to rethink the design of domestic settings, prompted by climate change, a growing population, rapid urbanization, global pandemics, and limited access to nature. Humans are spending considerably less time outdoors and residing in crowded urban areas. Looking to the future, society is preparing for the possibility of living in extreme environments on Earth and other planets. Such homes may be spatially confined (capsule habitats, like submarines or spacecrafts), or microhomes (dwellings less than 200 square feet).
Evidence shows that confined spaces can stress inhabitants due to separation from nature and prolonged social isolation, which negatively impacts emotional wellbeing. To prevent the spread of infectious disease, stay-at-home measures further compel the need to find ways to sustain mental health during long periods spent in tighter confines.
Embedding ecologically-rich, interactive biofeedback interfaces into domestic architecture can enrich the experience of living in a confined, isolated space. “pheB” is a robotic, “plant-human, embodied, biofeedback” system aiming to support the wellbeing of human inhabitants in confined, physical spaces. This bio-cyber-physical surface aims to provide inhabitants with therapeutic support manifested as gentle, responsive behaviors of the soft robot, shaped by computational transformations of electrical signals emitted by plants and humans. This robotic interface is designed to increase the inhabitant’s ability to regulate emotions through biofeedback, whereby the robot behavior and physiological states of the plant-human dyad synchronize.
Our key research questions are two: (1) do tangible, embodied interaction modalities increase the effectiveness of mindful breathing practices and biofeedback?; and (2) do tangible, embodied representations of a plant’s internal states amplify the restorative effects of nature through a more expressive interaction?
p u b l i c a t i o n s :
Sabinson, E., Pradham, I., and Green, K. E. 2021. Plant-Human Embodied Biofeedback (pheB): A Soft Robotic Surface for Emotion Regulation in Confined Physical Space. In Proceedings of TEI 2021, the Fifteenth International Conference on Tangible, Embedded, and Embodied Interactions (TEI 2021). ACM, New York, NY, USA, Article no. 89, pp. 1-14, doi: https://doi.org/10.1145/3430524.3446065. [video]
E. B. Sabinson and K. E. Green, "How do we feel? User Perceptions of a Soft Robot Surface for Regulating Human Emotion in Confined Living Spaces," 2021 30th IEEE International Conference on Robot & Human Interactive Communication (RO-MAN 2021), 2021, pp. 1153-1158, doi: 10.1109/RO-MAN50785.2021.9515499.
[video]
Steelman, A. W., Sabinson, E., Pradham, I., and Green, K. E. 2021. Simulating Ocean Wave Movement in a Soft Pneumatic Surface. In Proceedings of 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2021)
September 27 - October 1, 2021. Prague, Czech Republic. [video]
Sabinson, E., Pradham, I., and Green, K. E. 2024. With Every Breath You Take: Testing the Effects of Soft Robitic Surfaces on Attention and Strees. In Proceedings of the 2024 ACM/IEEE Conference on Human-Robot Interaction
(HRI 2024). ACM, New York, NY, USA, 611-620.,
doi: https://doi.org/10.1145/3610977.3635004. [video]
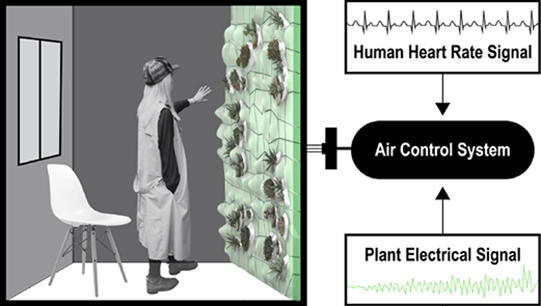
Envisioned bio-cyber-physical system.

pheB: later tabletop prototype used for user studies (e.g., for HRI'24, N=94).
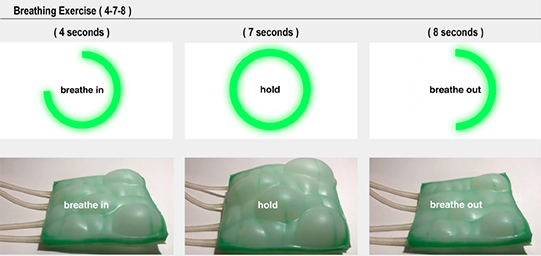
pheB: early tabletop prototypes for breathing exercise.
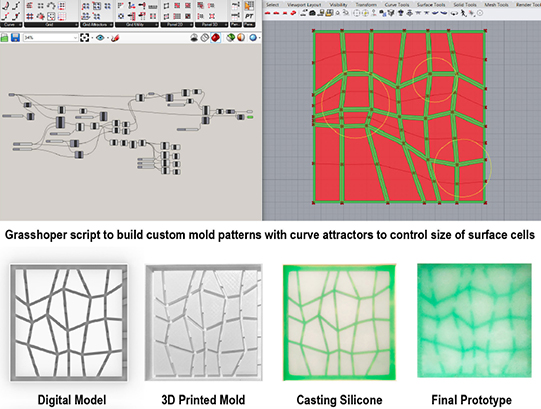
pheB: from digital design to digital manufacture.
|
 |