|
|||||||||
 |
 |
 |
 |
 |
 |
 |
|||
-------------------------------------------- Ni Zhang P I s : -------------------------------------------- --------------------------------------------
|
|
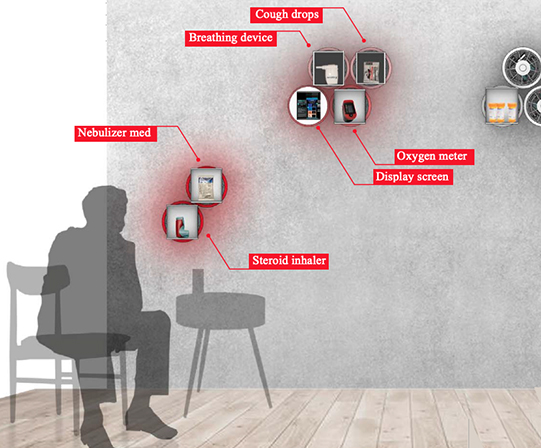
o v e r v i e w : A messy environment can be especially challenging for people with various forms of impairment, including older adults with mild cognitive impairment, patients recovering at home needing medication management, high-functioning individuals on the autism spectrum, and people of all ages that have mobility challenges due to an accident or otherwise. SORT (“Stuff-Organizing Robot Team”) is a system of wall-climbing robots for supporting independent living by helping users organize domestic items along vertical surfaces. SORT suggests how assistive technologies leverage our everyday physical environments to perform functional tasks towards improving users’ overall wellness. SORT is part of an emerging trend, advanced by the Architectural Robotics Lab, of research in tangible and embedded interaction within homes, workplaces, classrooms, and healthcare facilities.
p u b l i c a t i o n s : iEEE Spectrum article: Ackerman, E. Wall-Climbing Robot Shelves: Wall space is the new floor space. IEEE Spectrum magazine (August 2, 2022). Available at https://spectrum.ieee.org/wall-climbing-robot-shelves. Mengni Zhang, Jackson Hardin, Jiaqi Cai, Johnell Brooks and Keith Evan M. Zhang, T. Xu, J. Hardin, J. Jiaqi Cai, J. Brooks and K. E. Green, "How Many Robots Do You Want? A Cross-Cultural Exploration on User Preference and Perception of an Assistive Multi-Robot System," 2021 30th IEEE International Conference on Robot & Human Interactive Communication (RO-MAN 2021), 2021, pp. 580-585, doi: 10.1109/RO-MAN50785.2021.9515396.
|
|
||||||
 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|

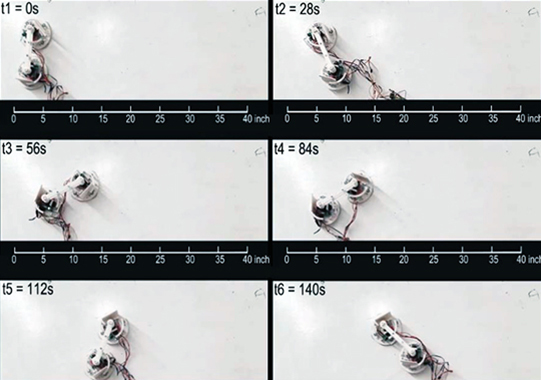
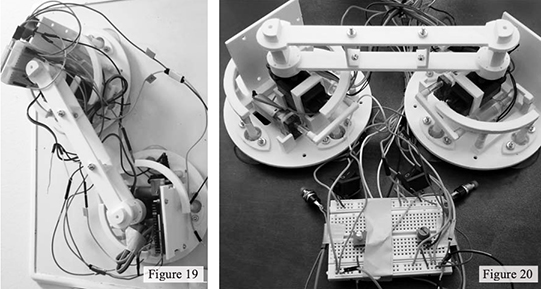 SORT working prototype 2.
SORT working prototype 2.