--------------------------------------------
p r o j e c t l e a d :
Deanna Kocher
MS/PhD student, Mech.E, Cornell
P I s :
Keith Evan Green l e a d P I
Design and Mech. E, Cornell
Tamar Kushnir
Cognitive Science, Duke Univ.
--------------------------------------------
p a r t n e r s :
Sciencecenter • Ithaca, NY
South Hill Elementary • Ithaca, NY
|
 |

Early study investigating how a robot responds to an errant robot.
Children-Robot Collaboration / MAPLE
How Young Children Learn and Collaborate
in an Interactive Environment
with Non-Humanoid Mobile Robots
• VIDEO of MAPLE | IEEE ROBOT'24
• VIDEO of Sapling | IDC'22
• VIDEO of Growbot | IDC'20 BEST DEMO PAPER
o v e r v i e w :
We have been investigating cognitive development and embodiment as present in both human and machine elements, specifically in how young children learn and collaborate in an interactive environment with non-humanoid mobile robots:
• "MAPLE" in her forest of maple trees | VIDEO
• "SAPLING" the smaller-scaled, low-cost MAPLE | VIDEO
• "GROWBOT" which predated MAPLE and SAPLING | VIDEO
All of these robots fall under the MAPLE (Multi-Agent Prosocial Learning Environment) "tree."
To date, we have built several iterations of these non-huanoid robots, we have constructed an interactive, room-sized landscape where MAPLE and children collaborate, and we have conducted interaction studies with children, mostly ages 3-7. We aim to: (a) understand children’s performance of spatial tasks with the robot’s assistance; (b) understand under what conditions and how a child helps a robot that makes mistakes; and (c) advance the design of a robot that learns from children’s decisions as children and the robot perform tasks together.
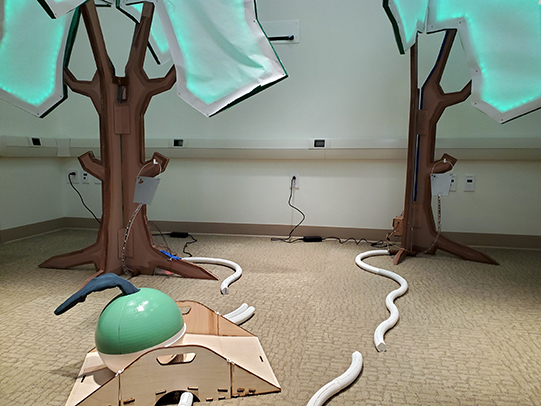 MAPLE, the robot, in a forest of interactive trees. MAPLE helps children with the task of joining pipes in the process of collecting maple syrup | VIDEO. MAPLE, the robot, in a forest of interactive trees. MAPLE helps children with the task of joining pipes in the process of collecting maple syrup | VIDEO.
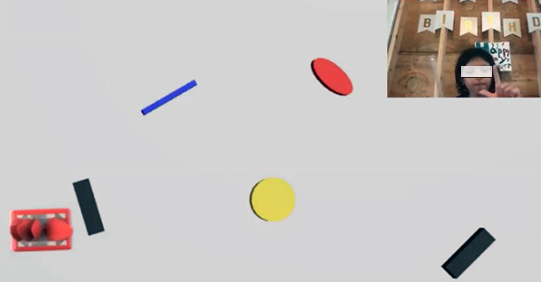
A screen shot of a virtual (live, online) study where a child is directing an early, MAPLE-like robot to reach a target. We conducted remote studies when on-site studies were prohibited during the pandemic. | IEEE ICDL PAPER.
i n t r o a n d l o n g e r a i m s :
As robots increasingly become a part of our daily routines, they will encounter conditions unanticipated in their design. In concept, this shortcoming can be overcome by advancing the intelligence of the robot such that it quickly acclimates to any new environment. Another approach is to design a robot that is not fully prepared for a new environment, yet seeks help for its shortcomings from a human collaborator.
Previous studies have demonstrated how an “error prone” robot verbally expresses to a human its error and/or need for help. In such studies, almost always, the robot is a humanoid (like the familiar Nao) and the human is an adult who offers the robot an adult’s knowledge and skill. Substituting a non-humanoid robot for the humanoid and a child for the adult represents a transformative concept: mutual learning in a machine and a human that is not as “fully formed” as, respectively, a humanoid (in the future) or a human (mature adult). Here, in the process of a collaborative task, the non-humanoid robot benefits from a child’s assistance, and the child learns from a robot that doesn’t mimic a human but behaves more like a machine.
This
research will advance understanding in robotics and childhood psychology by offering:
A Novel Machine Learning Algorithm: To develop a learning algorithm for an “error prone” robot following from the “corrective measures” offered by the child in a collaborative child-robot task. This algorithm would enable learning in not only the robot but also the child in accomplishing a collaborative task.
A Novel Robot Design: To design the motion planning of an error-prone, non-humanoid robot in such a way that it motivates a child to assist the robot, setting forth the condition for mutual child-robot learning.
A Novel Approach to Childhood Learning: To demonstrate that an error-prone robot that itself learns from a collaborative task can facilitate learning in the collaborating child, thereby increasing, also, a child’s knowledge and/or skill retention.
 SAPLING - MAPLE scaled to an easily transportable size - seen above traveling on a puzzle board. The small size of SAPLING permits both longitudinal studies and studies at concurrent sites - at school and in homes | IDC VIDEO. SAPLING - MAPLE scaled to an easily transportable size - seen above traveling on a puzzle board. The small size of SAPLING permits both longitudinal studies and studies at concurrent sites - at school and in homes | IDC VIDEO.
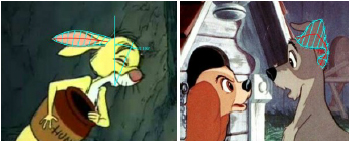
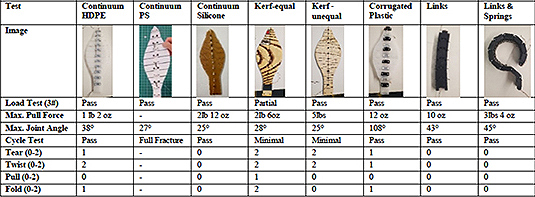 A figure (top) and a table (above) from our RO-MAN paper that reported on the development of an "emotive" appendage of a non-humanoid robot modeled on animators' depictions of emotions exhibited by cartoon characters. A figure (top) and a table (above) from our RO-MAN paper that reported on the development of an "emotive" appendage of a non-humanoid robot modeled on animators' depictions of emotions exhibited by cartoon characters.
p u b l i c a t i o n s :
D. Kocher,* T. Kushnir and K. E. Green, MAPLE: A Multi-Agent, Prosocial Learning Environment, Engaging and Motivating Children, 2024 7th Iberian Robotics Conference (ROBOT), Madrid, Spain, 2024, pp. 1-6, doi: 10.1109/ROBOT61475.2024.10797392. | VIDEO.
eanna Kocher, Emily Hana Abbruzzese, Olivia Rodriguez, Julia Mayourian, and Keith Evan Green. 2022. Sapling & the Travelling Forest: A table-top mobile robot platform for child-robot games. In Interaction Design and Children (IDC '22). Association for Computing Machinery, New York, NY, USA, 621–624. https://doi.org/10.1145/3501712.3535273 | VIDEO.
Kocher, D. Kushnir, T., Sarmiento, L., Heller, S. and Green, K. E. Better Together: Young Children’s Tendencies to Help a Non-Humanoid Robot Collaborator. IDC '20: Proceedings of the Interaction Design and Children Conference. June 2020 Pages 243–249 https://doi.org/10.1145/3392063.3394426.
D. Kocher, J. Bendheim and K. E. Green, "Design and Evaluation of an Affective, Continuum Robotic Appendage for Child-Robot Interaction," 2021 30th IEEE International Conference on Robot & Human Interactive Communication (RO-MAN 2021), 2021, pp. 586-591, doi: 10.1109/RO-MAN50785.2021.9515546.
D. Kocher, L. Sarmiento, S. Heller, Y. Yang, T. Kushnir and K. E. Green, "No, Your Other Left! Language Children Use To Direct Robots," 2020 Joint IEEE 10th International Conference on Development and Learning and Epigenetic Robotics
(ICDL-EpiRob), 2020, pp. 1-6, doi: 10.1109/ICDL-EpiRob48136.2020.9278108.
Kocher, D. Crandall, C. Yuan, C. and, Green, K. E. GROWBOT: A Robotic System to Help Children Grow Plants. Interaction Design and Children. (IDC ’20 Extended Abstracts), June 21–24, 2020, London, United Kingdom. ACM 978-1-4503-8020-1/20/06. https://doi.org/10.1145/3397617.3402038 BEST DEMO PAPER | VIDEO.

Growbot. | IDC '20 BEST DEMO PAPER | VIDEO.
|
 |