--------------------------------------------
p r o j e c t l e a d :
Yibing Lu
BS Design/M.Eng, CS, Cornell
P I s :
Keith Evan Green l e a d P I
Design and Mech. E, Cornell
Ian D. Walker
ECE, Clemson
Johnell Brooks
Hum. Factors Psy./AutoE, Clemson
Tapo Bhattacharjee
CS, Cornell
Haym Hirsh
CS, Cornell
---------------------------------------------
f u n d i n g :
U.S. National Science Foundation # IIS-1703267: "SCH: EXP: Home+, An Intelligent and Interoperable Suite of Robotic Furnishings, Learning and Evolving with Their Users"

---------------------------------------------
s t u d e n t t e a m :
Xingda Chen
MS, Design, Cornell
Joanna Tan
BS/M.Eng, Mech E., Cornell
Gene Wicaksono
BS ECE, Cornell
Vivien Chen
BS CS, Cornell
Penny Ren
BS IS, Cornell
Megan Wong
BS/M.Eng, Mech E., Cornell
Derek Chiou
BS/M.Eng, Mech E., Cornell
Matthew Taub
BS/M.Eng, Mech E., Cornell
Diane Pillsbury
BS, ECE, Cornell
Robert Shield
BS/M.Eng, Mech/Sys. E., Cornell
Olivia Roberts
BS/M.Eng, Mech E., Cornell
Zach Hawks
MS. ECE, Clemson
Amritha Ananthanarayanan
MS. ECE, Clemson
Christian Ray
M.Eng, Mech E., Cornell
Justin Jacbos
M.Eng, Mech E., Cornell
Boya Zhang
BS, Mech E., Cornell
Robert Shield
BS, Mech E., Cornell
Mengni Zhang
PhD Design, Cornell
Yanchen Zhan
BS, CS., Cornell
Jske Lammon
BS. ECE, Clemson
---------------------------------------------
c l i n i c a l t e a m :
Casey Jenkins
Clinical Research, Prisma Health
Stephanie Tanner
Gerentology, Prisma Health
William Logan Jr. MD
Gerentology, Prisma Health
---------------------------------------------
a d v i s o r y b o a r d :
Prof. M. Elaine Cress, Ph.D.
Director, Aging Physical Perf. Lab
Department of Kinesiology
University of Georgia
Marjorie George
Program Director
Alzheimer's Association
SC Chapter
Doris J. Gleason
Director, Community Outreach
AARP-SC
Jane M. Rohde, AIA, FIIDA, ACHA, AAHID
Principal and Architect
JSR Associates, Inc.
Senior Living and Healthcare
Ellicott City, MD
---------------------------------------------
o u r h o m e l a b :
 View of our home lab that we designed and fabricated. Located within the Roger C. Peace Rehabilitation Hospital of Prisma Health (Greenville Hospital System University Medical Center). View of our home lab that we designed and fabricated. Located within the Roger C. Peace Rehabilitation Hospital of Prisma Health (Greenville Hospital System University Medical Center).
The home lab has all the features of a typical studio apartment, including kitchen and dining areas, laundry room, and closet space.
|
 |

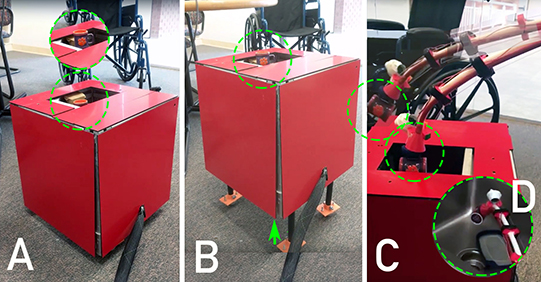
The mobile table and floor-lamp robots.
home+ robotic furnishings for aging in place
v i d e o
e a r l y p r o j e c t h i s t o r y
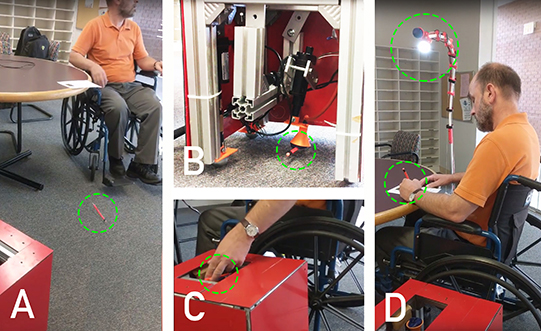 home+ ("prototype 2") picking up a pencil from the floor, handing it to a person in a wheelchair at just the right for him to manage its retrieval, and shining some light on his work activity. home+ ("prototype 2") picking up a pencil from the floor, handing it to a person in a wheelchair at just the right for him to manage its retrieval, and shining some light on his work activity.
o v e r v i e w :
As healthcare becomes more digital, technological, home-based, and costly, home environments have yet to become embedded with digital technologies to support routine physical interactions across people and their physical surrounding. This shortcoming motivated us to envision “home+” – networked, distributed, robots furnishing existing domestic environments (for aging in place) and healthcare facilities (for clinical care).
We initially developed a working prototype of the Assistive Robotic Table (ART) with support from NSF's Smart Health & Wellbeing Program (now SCH). During the ART cycle, the team continued developing the larger home+ concept, recognizing ART as integral to an assistive, enabling, cyber-physical ecosystem.
In the current SCH award cycle, the Cornell-Clemson-Prisma Health team is realizing the larger ambition of home+; together, we: (1) have established needs and wants, identifying those aspects of home+ that best promise to support independent living; (2) are iteratively co-designing and testing several robotic furnishings that, together, recognize, communicate with, and partly remember each other in interactions with human users; (3) are defining the pattern language of interactions for this cyber-human system; and (4) are evaluating the efficacy of home+ by comparing CS-PFP10 scores (measuring performance on 10 Activities of Daily Living that define a capacity for independence) for individuals from our target group, with and without home+.
 home+ ("prototype 2") picking up a dropped coffee mug and transfering it to the lamp robot, which capably places the dirty mug in the kitchen sink for washing. home+ ("prototype 2") picking up a dropped coffee mug and transfering it to the lamp robot, which capably places the dirty mug in the kitchen sink for washing.
p u b l i c a t i o n s :
Our paper for DRS 2024 on a low-cost/fidelity user study approach for home+:
Brooks, J. O., Jenkins, F., Jenkins, C, Tanner, S, Walker, I. D., and Green, K. E. 2024. Step-by-step: Using Low-Fidelity, Physical Prototypes of Enabling Technologies to Gain Feedback from Clinicians, Prior to Older Patients. In Gray, C., Ciliotta Chehade, E., Hekkert, P., Forlano, L. Ciuccarelli, P., and Lloyd, P. (eds.), DRS 2024 (Design Research Society), 23-28 June, Boston, USA. https://doi.org/10.21606/drs.2024.355.
Our paper for IEEE IROS on motion planning for home+:
Hawks, Z., Frazelle, C., Walker, I.D., and Green, K.E. (Accepted). Motion Planning for a Continuum Mobile Lamp: Defining and Navigating the Configuration Space. In Proceedings of IROS 2019: the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems.
Our paper for IEEE GHTC on design of an expanded suite of home+ furnishings:
Hawks, Z., Islam, M. S., Lastinger, M., Rutland, H., Trout, M., Walker, I. D., and Green, K. E. 2019. Robots in the Home: A Novel Suite of Interactive Devices for Assistance with Disease Prevention and Meal Preparation. IEEE GHTC (Global Humanitarian Technology Conference) 2019, October 17-20, Seattle WA, pp. 715-919.
Zach Hawks' MS Thesis (ECE) on home+ motion planning:
Hawks, Z. (May 2019). Motion Planning for a Continuum Robotic Mobile Lamp: Navigating the Configuration Space to Assist with Aging in Place. (Master's thesis, Clemson University, Clemson, SC, USA).
PI's book chapter on convivial robots for health, featuring home+:
Green, Keith Evan. 2017. The Convivial ART of Vortical Thinking In Critical and Clinical Cartographies: Architecture, Robotics, Medicine and Philosophy. ed.s Andrej Radman and Heidi Sohn. Edinburgh, Scotland: Edinburgh University Press, pp. 143-167.
Our paper for (ACM) Pervasive Health 2018 on design and early evaluations:
Verma, S. Gonthina, P., Hawks, Z., Nahar, D. Brooks, J. O., J., Walker, I.D., Wang, Y,. de Aguiar, A., and Green, K. E. 2018. Design and Evaluation of Two Robotic Furnishings Partnering with Each Other and Their Users to Enable Independent Living. In Proceedings of Pervasive Health 2018, New York, NY., May 21-24, 2018.
Our paper for (ACM) DIS 2018 on our aspiration for "conviviality" for home+:
Choueiri, M., Schuyler, D., Guria, S., McCarthy, C., Moure, P., Todalbagi, A., Wang, Y., Araujo de Aguiar, C., and Green, K. E. Can Interactive Systems Be Designed for Conviviality? A Case Study. In Proceedings of the 2018 ACM Conference Companion Publication on Designing Interactive Systems (DIS '18 Companion). ACM, New York, NY, USA, pp. 207-212. https://doi.org/10.1145/3197391.3205437
Our early paper for IEEE CASE on an earlier approach to home+:
De Aguiar, C., Fateminasab, R., Frazelle, C., Scott, R., Wang, Y., Wooten, M., Green, K. E., and Walker, I. D. The Networked, Robotic home+ Furniture Suite: a Distributed, Assistive Technology Facilitating Aging in Place. 2016. Proceedings of CASE 2016: the 12th Conference on Automation Science and Engineering, August 21-24, Fort Worth, Texas, USA, pp. 1067-1072.
Our early paper for HRI introducing this first home+ concept:
K.E.Green, I.D. Walker, J. O Brooks and W.C. Logan, Jr. comforTABLE: A Robotic Environment for Aging in Place, late-breaking paper, HRI’09, the IEEE/ACM International Conference of Human-Robot Interaction, March 11–13, 2009, La Jolla, California, USA.
Our unpublished paper on the perceptual processes of our home+ concept:
V.N. Murali, A L. Threatt,... J O. Brooks, I.D. Walker, and K E. Green.(Ocotober 2013). A Mobile Robotic Personal Nightstand with Integrated Perceptual Processes.
Our early paper for IROS presenting home+ 2011, with video 1 and 2:
Threatt, A. L., Merino, J., Green, K.E., Walker, I.D., Brooks, J. O. et. al. A Vision of the
Patient Room as an Architectural Robotic Ecosystem. Video (IEEE archival) in Threatt, Proceedings of IROS 2012: the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Algarve, Portugal, October 2012.
|
 |