|
|||||||||
 |
 |
 |
 |
 |
 |
 |
|||
-------------------------------------------- -------------------------------------------- PhD Student grads are faculty at: Graduates of the lab also go to:
-------------------------------------------- • Politecnico di Milano • Hong Kong Poly U, • idStudioLab, Interactive Environ.s • Cambridge University
|
|
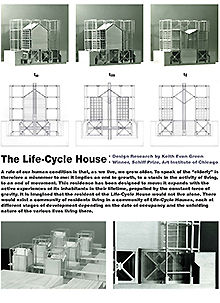
A professionally licensed architect with degrees in architecture and psychology, Green founded the field of architectural robotics—the practice of designing physical environments that act, think, and grow with their inhabitants. Green’s book Architectural Robotics: Ecosystems of Bits, Bytes and Biology (MIT Press) established the theoretical foundation for architectural robotics. His work has been published extensively in ACM and IEEE venues, and he has trained a generation of PhD students now teaching at leading R1 universities. At Cornell, Green served as department chair and co-led the effort to create Cornell's Department of Human Centered Design, combining two smaller design programs. Green was previously at Clemson University (as tenured full professor in Architecture and ECE) and the University of Auckland (tenured in Architecture). Early in his career, Green directed Clemson's architecture program in Barcelona; later he became founding director of Clemson's Institute for Intelligent Materials, Systems, & Environments and its associated Digital Ecologies graduate concentration. An award-winning architect, Green received the Schiff Foundation Prize in Architecture and Design of the Art Institute of Chicago where his models and drawings are housed in the permanent collection of the Department of Architecture and Design. Green earned a B.A. in psychology and M.S. and Ph.D. in architecture from the University of Pennsylvania, and a Master of Architecture degree from the University of Illinois at Chicago. Green has researched and/or taught for extended periods in Barcelona, Milan, Auckland (New Zealand), and Delft (Netherlands) where he was Visiting Professor at TU Delft's ID-StudioLab. KEY PUBLICATIONS
Serena Ge Guo,* Jenny J. Yu,* Wenqian Niu,* Yifei Gao,* Guy Hoffman, Gilly Leshed, and Keith Evan Green. 2026. Robot-Mediated Mutual Gaze: How a Mobile Robot with Actuated Mirrors Facilitates Encounters between Strangers. In Proceedings of the 21st ACM/IEEE International Conference on Human-Robot Interaction (HRI '26). Association for Computing Machinery, New York, NY, USA, 275–284. https://doi.org/10.1145/3757279.3785647. BEST DESIGN PAPER link Schafer. G, Green, K. E., Walker, I. D., Fullerton, S. K. In Press. Words Become Worlds: The LIT ROOM, a Literacy Support Tool at Room-Scale. In Proceedings of the 2018 Designing Interactive Systems Conference (DIS '18). ACM, New York, NY, USA, 511-522. DOI: https://doi.org/10.1145/3196709.3196728. BEST PAPER. [video showing school kids in the LIT ROOM]; [time-lapsed video showing its assembly] Raquel Cañete,* Yarden Kedar, & Keith E. Green. e-MoBo, a Low-Cost, “Robo-Mediator” Helping Therapists Teach Children How to Express Emotions: Insights from Field Testing. 33rd IEEE International Conference on Robot & Human Interactive Communication (RO-MAN), Pasadena, CA, 2024. “KAZUO TANIE” BEST PAPER AWARD Kocher, D. Crandall, C. Yuan, C. and, Green, K. E. GROWBOT: A Robotic System to Help Children Grow PlantsInteraction Design and Children. (IDC ’20 Extended Abstracts), June 21–24, 2020, London, United Kingdom. ACM 978-1-4503-8020-1/20/06. https://doi.org/10.1145/3397617.3402038. BEST DEMO PAPER. [video]. Houayek, H, Green, K. E., Gugerty, L. Walker, I. D. and Witte, J. AWE: An Animated Work Environment for Working with Physical and Digital Tools and Artifacts. In Journal of Personal and Ubiquitous Computing [JPUC], June 2014, Volume 18, Issue 5, pp. 1227–1241. [video clip from IEEE that was on IEEE's homepage as a featured project] Soleimani, A., Herro, D., Green, K. E., and Walker, I. D.2019.CyberPLAYce – A Tangible, Interactive Learning Tool Fostering Children’s Computational Thinking through Storytelling. International Journal of Child-Computer Interaction, Elsevier, 20C, pp. 9-23. https://doi.org/10.1016/j.ijcci.2019.01.002. [video clip] Threatt, A. L., Merino, J., Green, K. E. & Walker, I. D. An Assistive Robotic Table for Older and Post-Stroke Adults: Results from Participatory Design and Evaluation Activities with Clinical Staff. In Proceedings of CHI 2014: the ACM Conference on Human Factors in Computing Systems,Toronto, Ontario, Canada, pp. 673–682. Yanik, P.M., Merino, J., Threatt, A.L., Manganelli, J., Brooks, J.O., Green, K.E. and Walker, I.D. A Gesture Learning Interface for Simulated Robot Path Shaping with a Human Teacher. IEEE Transactions on Human Machine Systems, 44(1): 41-54, 2014. Z. Hawks, C. Frazelle, K. E. Green and I. D. Walker. Motion Planning for a Continuum Mobile Lamp: Defining and Navigating the Configuration Space. 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 2019, pp. 2559-2566, doi: 10.1109/IROS40897.2019.8967841.
|
|
||||||
 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|